




NVIDIA 携手全球机器人领导者,将物理 AI 带入现实世界
新闻摘要: GTC — NVIDIA 正携手全球机器人生态系统——包括顶尖的机器人“大脑”开发企业、工业机器人巨头以及人形机器人先锋企业——共同推动生产级物理 AI 的发展。NVIDIA 还发布了全新的 NVIDIA Isaac™ 仿真框架,以及新一代 NVIDIA Cosmos™ 与 NVIDIA Isaac GR00T 开放模型,旨在助力行业开发、训练并部署下一代智能机器人。 基于 NVIDIA 平台进行开发的行业领先企业包括 ABB Robotics、智元机器人、Agility、FANUC
新闻摘要:
- 全球物理 AI 领域的领导者——包括机器人“大脑”开发商、工业与手术机器人巨头、人形机器人先锋企业,如 ABB Robotics、智元机器人、Agility、CMR Surgical、FANUC、Figure、Hexagon Robotics、KUKA、Medtronic、Skild AI、Universal Robots、World Labs 及 YASKAWA 正基于 NVIDIA 技术,大规模开发并部署物理 AI。
- NVIDIA 发布全新 NVIDIA Cosmos 世界模型、NVIDIA Isaac 仿真框架以及 NVIDIA Isaac GR00T N 系列模型,加速迈向智能机器人时代。
- 从高精密电子装配、自动化施工部署,到面向各类规模制造商的 AI 驱动自动化,战略生态系统合作伙伴正在将平台整合转化为现实世界的工业影响力。
GTC — NVIDIA 正携手全球机器人生态系统——包括顶尖的机器人“大脑”开发企业、工业机器人巨头以及人形机器人先锋企业——共同推动生产级物理 AI 的发展。NVIDIA 还发布了全新的 NVIDIA Isaac 仿真框架,以及新一代 NVIDIA Cosmos 与 NVIDIA Isaac GR00T 开放模型,旨在助力行业开发、训练并部署下一代智能机器人。
仿真框架,以及新一代 NVIDIA Cosmos 与 NVIDIA Isaac GR00T 开放模型,旨在助力行业开发、训练并部署下一代智能机器人。
基于 NVIDIA 平台进行开发的行业领先企业包括 ABB Robotics、智元机器人、Agility、FANUC、Figure、Hexagon Robotics、KUKA、Skild AI、Universal Robots、World Labs 和 YASKAWA。
NVIDIA 创始人兼首席执行官黄仁勋表示:“物理 AI 时代已经到来——未来每一家工业企业都将成为机器人公司。NVIDIA 的全栈平台——涵盖计算、开放模型及软件框架——为机器人行业奠定了坚实的基础,它凝聚了全球生态系统之力,共同打造智能机器,为下一代工厂、物流、交通及基础设施注入动能。”
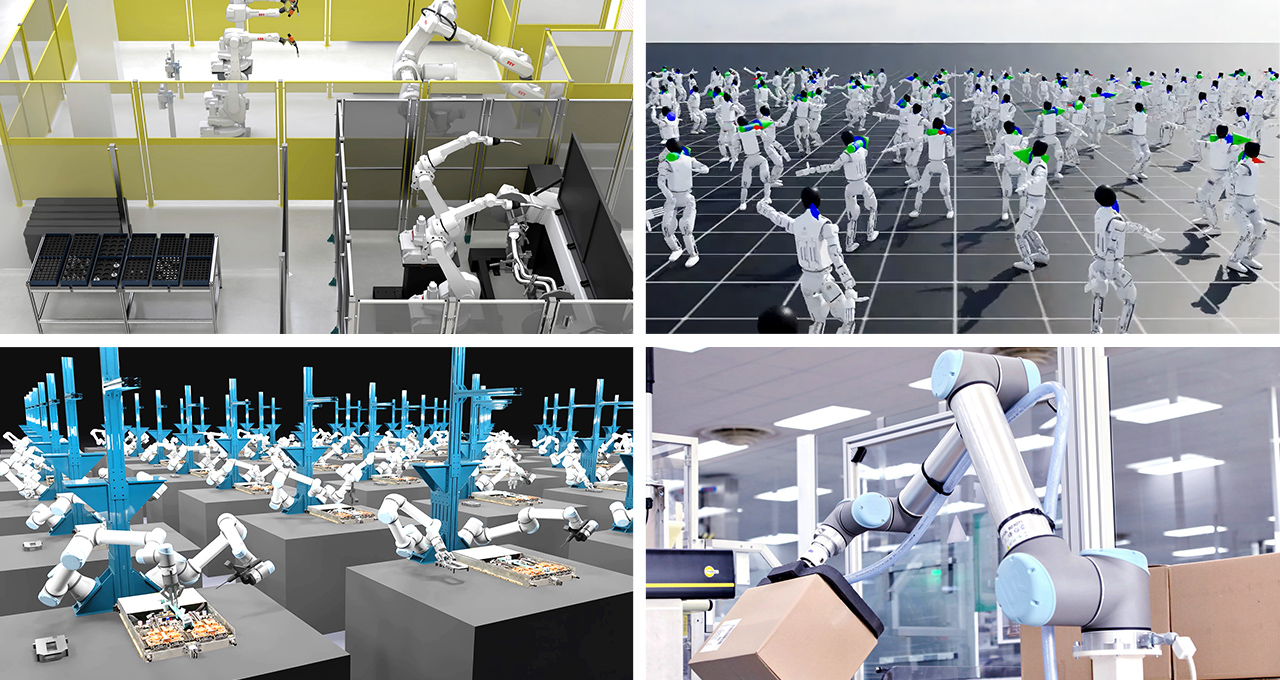
验证全球最大规模的机器人集群
随着工业机器人日益由 AI 驱动,制造商需要具备物理精度的、高保真的仿真系统,以便在部署前对系统进行设计、测试和优化。
全球机器人装机量超 200 万台的 FANUC、ABB Robotics、YASKAWA 和 KUKA 正将 NVIDIA Omniverse 库 与 NVIDIA Isaac 仿真框架集成至其虚拟调试解决方案中,旨在通过物理精度的数字孪生技术,开发并验证复杂的机器人应用乃至整条生产线。为了在生产线上实现高阶智能,这些企业正在将 NVIDIA Jetson 模块集成到其控制器中,以实现边缘端的实时 AI 推理。
为任意形态的机器人构建“大脑”
机器人正从执行特定任务的专用设备,演变为兼具适应性与专业性的通用-专家系统,且能保持工业级部署所需的精度与可靠性。为实现这一目标,机器人需具备类人的推理能力,以及自主感知、决策与行动的能力。
像 FieldAI 和 Skild AI 这样的领先开发商正在利用 NVIDIA Cosmos 世界模型进行数据生成,并借助 Isaac 仿真框架在仿真环境中验证策略,以此构建通用化的机器人大脑,从而让任何形态的机器人仅需极少复训练即可掌握新任务。World Labs 正使用 Isaac Sim 验证其生成式世界模型,而 Generalist AI 正基于 Cosmos 探索生成合成数据。
NVIDIA 今日发布 Cosmos 3。这是首个将合成世界生成、视觉推理与动作模拟统一起来的世界基础模型,旨在加速复杂环境中通用机器人智能的开发。
为新一代人形机器人发展注入动力
构建人形机器人是机器人领域最具挑战性的方向之一。要复现人类的运动能力、灵巧操作能力与推理能力,需要将先进 AI、感知与实时控制技术紧密集成于安全、可靠的自主系统之中。
包括 1X、智元机器人、Agility、Agile Robots、Boston Dynamics、Figure、Hexagon Robotics、Humanoid、Mentee 和 NEURA Robotics 在内的行业领先企业,正基于 Cosmos 世界模型、Isaac Sim 与 Isaac Lab 打造下一代人形机器人,以加速其机器人的开发与验证进程。
NVIDIA 今日发布了 Isaac Lab 3.0 抢先体验版,使机器人能够在 NVIDIA DGX 级基础设施上实现更快、更大规模的学习。该版本基于全新 Newton 物理引擎 1.0 与 NVIDIA PhysX® 软件开发套件,新增了多物理场仿真功能,并强化了对复杂灵巧操作场景的支持。
智元机器人、Humanoid、LG Electronics、NEURA Robotics 和 Noble Machines 也正采用 NVIDIA Isaac GR00T N 系列模型,加速其人形机器人的工业化部署进程。NVIDIA 宣布 GR00T N1.7 现已开放抢先体验版,并支持商业授权,旨在通过引入包括先进灵巧控制在内的通用机器人技能,助力机器人实现量产就绪的部署。
此外,在 GTC 主题演讲中,黄仁勋预告了新一代机器人基础模型 GR00T N2。该模型基于 DreamZero 研究成果,采用了全新的世界动作模型架构,相较于当前领先的视觉语言动作模型,其在新环境中执行新任务的成功率可达到两倍以上。GR00T N2 计划于今年年底发布,目前在 MolmoSpaces 与 RoboArena 通用机器人策略排行榜上均位列第一。
这些系统均由 NVIDIA Jetson Thor 机器人计算平台驱动,使开发者能够以更高的速度、更强的智能水平与可靠性,将机器人从仿真训练无缝过渡到现实世界部署。
将物理 AI 扩展至医疗健康机器人领域
医疗健康是物理 AI 最典型的应用机遇,然而在外科手术、医学影像和医院环境中部署自主系统,要求基础设施必须符合最高安全标准与监管要求。
CMR Surgical 正使用 Cosmos-H 仿真技术,在临床部署前训练并验证其 Versius 手术系统的机器人智能。强生医疗科技正采用基于 Isaac Sim 与 Cosmos 的后训练工作流,训练和验证其 Monarch 泌尿外科平台系统。Medtronic 则正在探索使用 NVIDIA IGX Thor,以在手术机器人系统中实现关键任务级精度与功能安全。
全球机器人创新催化剂
通过构建集设计、训练、测试与部署于一体的开放物理 AI 平台,NVIDIA 正推动机器人生态系统内的深度协作。这对于在现实世界中实现规模化落地至关重要。
与行业领袖的战略合作,已开始将平台集成转化为实实在在的现实影响力。
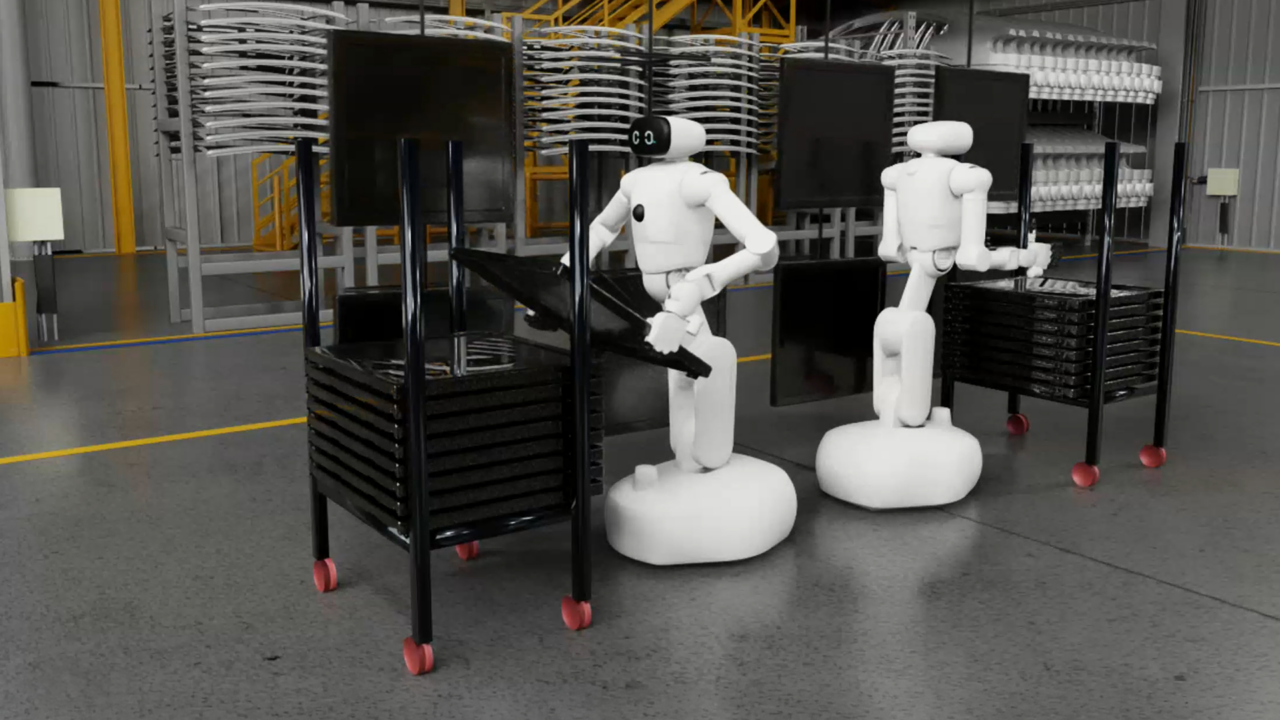
Skild AI 正与 ABB Robotics 及 Universal Robots 合作,在不同行业和任务中部署其通用机器人智能。通过在广泛部署的工业与协作系统中嵌入共享智能层,制造商无需为每个工作流编写任务专用代码,即可将自动化扩展至更动态、多变的应用场景。同时,Skild AI 还与 Foxconn 合作,为 NVIDIA Blackwell 生产线高精度装配提供支持。这一合作使 Foxconn 的 AI 驱动型双臂机械臂能够胜任行业内最复杂的制造任务。
光轮智能正与 NVIDIA 共同开发并校准 Newton 物理引擎,旨在帮助三星的装配机器人能在仿真环境中精准掌握复杂的线缆操作,从而实现更高的装配精度和更快的生产线速度。
PTC 宣布推出全新机器人从设计到仿真的工作流,该流程将其云原生 Onshape 计算机辅助设计(CAD)与产品数据管理平台与 NVIDIA Isaac Sim 连接起来,构建了无缝衔接的 CAD-to-OpenUSD 桥梁,使 FANUC America Corporation 和 Fauna Robotics 等工程团队能在物理精确的数字孪生环境中设计并验证其机器人系统。
WORKR 正在将其 AI 平台与 ABB Robotics 工业机器人进行集成,并使用 NVIDIA Omniverse 库作为其 WorkrCore 系统中的一部分,来训练一支可由中小型制造商在几分钟内部署、且无需编程知识的机器人劳动力队伍。
供应链解决方案公司凯傲集团正与 NVIDIA 和埃森哲合作,推进自主仓库解决方案的发展。借助 Omniverse 以及由埃森哲首创的、由物理 AI 驱动的数字孪生与系统架构,凯傲集团的工程师可构建大规模、物理精确的仓库数字孪生,为全球最大的纯合同物流业务供应商 GXO,训练并测试基于 NVIDIA Jetson 的自主叉车车队。
Microsoft Azure 与 Nebius 正在集成 NVIDIA 物理 AI 数据工厂 Blueprint,为开发者提供可扩展、智能体驱动的合成数据生成能力,其用户包括 FieldAI、Teradyne Robotics、Azure 的 Hexagon Robotics,以及 Nebius 的 RoboForce。CoreWeave 正在集成 NVIDIA Isaac Lab,用于构建机器人学习管线。阿里云正将 NVIDIA 完整的物理 AI堆栈集成至其 AI 平台,以加速端到端机器人开发。
迪士尼基于 NVIDIA Warp 框架开发的 GPU 加速物理仿真器 Kamino 现已集成至 Newton,正用于训练迪士尼“雪宝”与 BDX 机器人的机器人策略。借助该仿真器,“雪宝”学会了自主管理体温并降低碰撞噪音,而 BDX 机器人能够在复杂环境中导航。在 GTC 主题演讲中,黄仁勋与迪士尼的“雪宝”同台亮相。“雪宝”即将于 3 月 29 日在巴黎迪士尼乐园首次与公众见面。
助力未来的物理 AI 先驱启航
NVIDIA 致力于确保物理 AI 的工具惠及从早期初创企业到全球开源社区的每一位创新者。
通过其拥有超过 4 万名会员的全球创业企业孵化项目“NVIDIA 初创加速计划”,NVIDIA 为机器人领域的先锋企业提供了一个专有的入口,以接入其开放物理 AI 栈。包括 Bedrock Robotics、Dexterity AI、Flexion、光轮智能、RIVR、Standard Bots、Vention 和 World Labs 在内的初创加速计划会员企业,不仅能够获得技术指导、高性能计算资源,还能获得与机器人生态中关键合作伙伴和客户的对接机会。
NVIDIA 还与 Hugging Face 合作,将 Isaac 与 GR00T 集成至 LeRobot 开源框架,此举旨在将 NVIDIA 全球 200 万机器人开发者与 Hugging Face 全球 1300 万 AI 建设者连接起来,共同加速开源机器人技术的发展。